| �oˢ늙C�{��Ч�ʡ����������L�����ȃ�(y��u)�ݣ��V����(y��ng)���ڬF(xi��n)���Ԅӻ����I(y��)�I(l��ng)��ͨ���oˢ늙C�Ŀ��Ʒ��������o�п��ơ��ип��ơ��ň�ʸ�����ƣ�FOC�������Ҳ����ơ�ֱ���D(zhu��n)�ؿ��ƣ�DTC����ģ���A(y��)�y���ƣ�MPC���N��ʽ���@�N���Ʋ��ԑ�(y��ng)���ڲ�ͬ�Ĉ����£��䌍�F(xi��n)���y�׳̶�Ҳ��ʮ�����@���@ƪ������Ҫ��һ������Ϥ�����N���Ʒ�ʽ�����o�С��ик�FOC��
�o�п������oˢ늙C�ڟo�D(zhu��n)��λ�Â�����������������������r�£�ͨ�^����(y��ng)���㷨�Ϳ��Ʋ��Կ��Ɵoˢ늙C�Ć��Ӻͷ�(w��n)���\�С��ض����㷨һ������^�y��늄ӄݻ���������ֱ��λ�Â�������
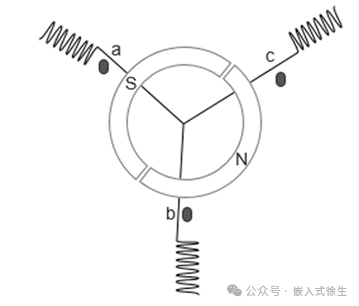
�^��z�y���o�п��Ƶij��ò�����ͨ�^�z�y��늄ӄݵ�׃�����Д��oˢ늙C���D(zhu��n)��λ�ã���D��ʾ��o�п��Ƶķ�늄ӄݙz�y�·��
�ڟoˢ늙C�Q��ԭ���У����oˢ늙C����z��ͨ늵���r�£�ʣ��đҿ�����܉�z�y����늄ӄݡ����D(zhu��n)����0���D(zhu��n)��60�����g����늄ӄ��^��һ�Σ��@�N����Ҳ���dz��f���^��z�y��
���oˢ늙C�������ͨ���r�£�ʣ���ҿ�����ܙz�y����늄ӄݣ��z�y����늄ӄ�̎�����cλ�Õr���D(zhu��n)��̎���c�ҿ���ͬһ����ƽ�з�����̎����λ�Q����Ƅ�30�㣬���Ƅ�30��Ǽ���Q���c�����ԣ��ڽ��������^���¼����Ɵoˢ늙C�����ˌ��F(xi��n)���_�Q���c��������һ���Q�����ڵĕr�g���㱾����30�����t�ǵĕr�g���t��
�o�п��ƵĆ����֞������A�Σ��A(y��)��λ�����Ӽ��١��]�h(hu��n)���ơ�
1���A(y��)��λ �Ƚoij����ͨ�һ�Εr�g���D(zhu��n)���D(zhu��n)���A(y��)����λ�ã�ͨ�ռ�ձȣ�һ��30~50���͕r�g��Ҫ̫��������l(f��)�ͨ늕r�g��ռ�ձ���Ҫ����(j��)��ͬ��늙C��ؓ�d��r�_������t���ܕ������L�r�g��һ����Ȧ�ϼ�늟��ģ����ߕr�g̫�̲����A(y��)��λ��
2�����Ӽ��� ����(j��)��Ҫ�D(zhu��n)�ӵķ����D(zhu��n)��������νo����ͨ��늣��Q�ࣩ�����ӵ��^�̣���Ҫ��ΓQ�࣬����u���٣�ͬ�A(y��)��λһ�ӣ��@�������^��Ҳ�c���w��늙C��ؓ�d���P(gu��n)����Ҫ�Y(ji��)�ό��H�yԇ���_��ݔ��ռ�ձȵĴ�С���Q���l��̫�ͣ�늙C�������������ӷ��D(zhu��n)����ȦҲ���l(f��)����أ��Q���l��̫�ߣ�늙C�\����������ʧ������(d��o)�¼���ʧ����
3���]�h(hu��n)���� �����Ӽ��ٵ�һ���D(zhu��n)�ٕr����늄ӄݼ����^���c���Ա���(w��n)���ęz�y���r���Ϳ����ГQ���]�h(hu��n)���Ơ�B(t��i)��
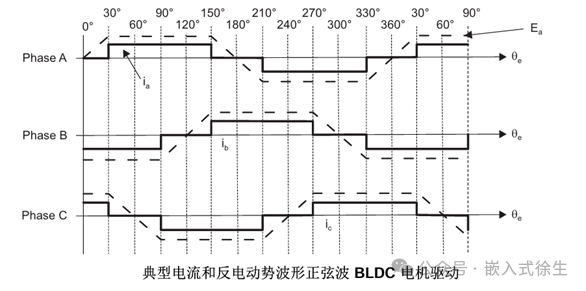
2 �ип���
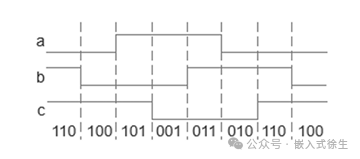
�oˢ늙C���ип���ָ�ڟoˢ늙C��BLDC���У�һ�����3���_�P(gu��n)�ͻ����������z�y�D(zhu��n)��λ�ã�����(j��)3������������ݔ���ľ��a����MOS�ܵ�ͨ�࣬�M�����F(xi��n)�Q�ࡣ
�ڟoˢ늙C��һ���3�������������g��120��ĈA�ֲܷ����b��D��ʾ��ݔ����̖�ߵ��ƽ��ռ180��ǡ��O(sh��)ݔ���ĸ��ƽ��1�����ƽ��0��ʾ���tݔ��������̖�ö��M�ƾ��a��ʾ���ϱ���
�D(zhu��n)��ÿ�D(zhu��n)��һ�ܿ���ݔ��6����̖�����ÿ��Ԍ���(y��ng)���������Q���6���^�̡��҂������ճ��S����ֵ�����ȥ����MOS�ܵ��_ͨ���P(gu��n)��
3 �ň�������ƣ�FOC��
FOC��Field-Oriented Control����ֱ�g�Ǵň�������ƣ�Ҳ���Q��ʸ������ ��VC��Vector Control�� ����Ŀǰ�oˢֱ��늙C��BLDC��������ͬ��늙C��PMSM����Ч���Ƶ��(y��u)����֮һ��FOCּ��ͨ�^���_�ؿ��ƴň���С�c����ʹ��늙C���\���D(zhu��n)��ƽ��(w��n)����С��Ч�ʸߣ����Ҿ��и��ٵĄӑB(t��i)푑�(y��ng)��
���Ӵň��ǹ̶��ģ����D(zhu��n)�Ӵň��S���D(zhu��n)�ӵ����D(zhu��n)���Ƅӡ����@�ɂ��ň�֮�g�ĊA�Ǟ�90∘�r���D(zhu��n)���еČ�(d��o)�w�и�Ӵň��Ĵ������ٶ���죬�@��(d��o)�����D(zhu��n)�ӌ�(d��o)�w�Юa(ch��n)�����ĸБ�(y��ng)������@Щ�Б�(y��ng)����ڶ��Ӵň����ܵ����傐Ɲ��Ҳ�����ˮa(ch��n)�������D(zhu��n)���أ���늴��D(zhu��n)�أ�Ҳ����������ʹ���Ӵň����D(zhu��n)�Ӵň�һֱ���90�㣬늙Cһֱ�a(ch��n)��������أ�����FOCʸ����������Q�Ć��}��
FOC��������
FOC���Ɵoˢ늙C�^�̣�ͨ�^���oˢ늙C����������ɘ��M��Clarke׃�Q�����������������̖�D(zhu��n)�Q�����������̖���ٽ�(j��ng)Park׃�Q�����D(zhu��n)׃�Q�����D(zhu��n)�Q��ɂ�ֱ����̖��������]�h(hu��n)��ݔ�룬�ٽ�(j��ng)��Park׃�Q�Ϳ��gʸ���}���{(di��o)�ƿ�������ȫ����_�࣬�Ķ����F(xi��n)�oˢ늙C�Ŀ��ơ�
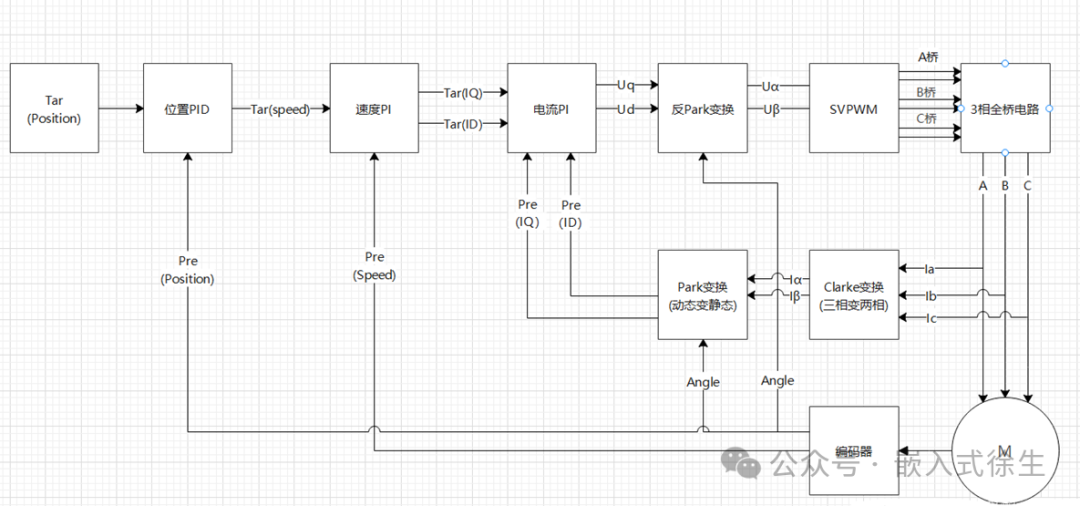
���ψD�Ľ�����£�
(1) ��늙C����������ɘӵõ�Ia Ib Ic,
(2) ��Ia Ib Ic, ��(j��ng)Clark׃�Q�õ�
(3) �� ��(j��ng)Park׃�Q�õ�Iq Id
(4) Ӌ��Iq Id���O(sh��)��ֵIq_ref Id_ref�`��
(5) ���������`������pid�������У��õ�ݔ������늉�Uq��Ud
(6) Uq��Ud�M�з�park׃�Q
(7) ��(j��ng)svpwmģ�K��clark��׃�Q��ݔ����mos�ܣ��a(ch��n)�����D(zhu��n)�������ň�������늙C�\�D(zhu��n)��
|
��Ϣ")