BLDC늙C�����㷨
�oˢ늙C�����ԓQ���ͣ����ҷ����D(zhu��n)�Q������˿����������ӏ�(f��)�s��BLDC늙C����Ҫ���˽�늙C�M�������D(zhu��n)����D(zhu��n)��λ�ú͙C�ơ������]�h(hu��n)�ٶȿ��ƣ��Ѓɂ�����Ҫ�������D(zhu��n)���ٶ�/��늙C����Լ�PWM��̖�M�Мy�����Կ���늙C�ٶ��Լ����ʡ�BLDC늙C���Ը���(j��)��(y��ng)��Ҫ�����߅���л���������PWM��̖�������(sh��)��(y��ng)�ÃHҪ���ٶ�׃��������������6��������߅����PWM��̖���@���ṩ�˵ķֱ��ʡ������(y��ng)��Ҫ�����(w��)����λ���ܺ��Ƅӻ�������D(zhu��n)�����]ʹ���a�����������PWM��̖�����˸Б�(y��ng)�D(zhu��n)��λ�ã�BLDC늙C���û���Ч��(y��ng)���������ṩ��λ�Б�(y��ng)���@�͌�(d��o)���˸��ྀ��ʹ�ú��ߵijɱ����o������BLDC����ʡȥ�ˌ��ڻ�������������Ҫ�����Dz���늙C�ķ�늄ӄݣ�늄ӄݣ����A(y��)�y�D(zhu��n)��λ�á��o���������ƌ������L�Ⱥͱ��@�ӵĵͳɱ�׃�ّ�(y��ng)�����P(gu��n)��Ҫ���ڲ���BLDC늙C�r������Ϳ��{(di��o)���s�CҲ��Ҫ�o���������ơ�
���d�r�g�IJ�����a�䣺�����(sh��)BLDC늙C����Ҫ���a��PWM�����d�r�g�������d�r�g�a�������ܕ�Ҫ���@Щ���Ե�BLDC��(y��ng)�ÃH�������BLDC�ŷ�늄әC�����Ҳ�����ʽBLDC늙C���oˢAC����PCͬ��늙C��
�����㷨
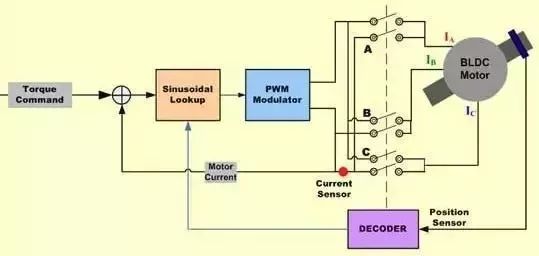
�S�ͬ�Ŀ����㷨���������ṩ����BLDC늙C�Ŀ��ơ����������ǣ������ʾ��w���������Է�(w��n)����������늙C늉������(q��)�Ӹ߹���늙C�r���@�N�����������á��߹���늙C��횲���PWM���ƣ���Ҫ��һ�����������ṩ���ӺͿ��ƹ��ܡ�
�����㷨����ṩ������헹��ܣ�
• ���ڿ���늙C�ٶȵ�PWM늉�
• ���ڌ�늙C�M�����Q��ęC��
• ���÷�늄ӄݻ�������������A(y��)�y�D(zhu��n)��λ�õķ���
�}�_�����{(di��o)�ƃH���ڌ���׃늉���(y��ng)�õ�늙C�@�M����Ч늉��cPWMռ�ձȳ����ȡ���?sh��)õ��m��?sh��)������Q��r��BLDC��Ť���ٶ������c����ֱ��늙C��ͬ�������ÿ�׃늉�������늙C���ٶȺͿ�׃�D(zhu��n)�ء�
���ʾ��w�ܵēQ��?q��)��F(xi��n)�˶����е��m���@�M�ɸ���(j��)�D(zhu��n)��λ�����ɵ��D(zhu��n)�ء���һ��BLDC늙C�У�MCU���֪���D(zhu��n)�ӵ�λ�ò��܉���ǡ��?sh��)ĕr�g�M�������Q��
BLDC늙C�����������Q��
����ֱ���oˢ늙C�������^�����������Q���Ǻ��εķ���֮һ��
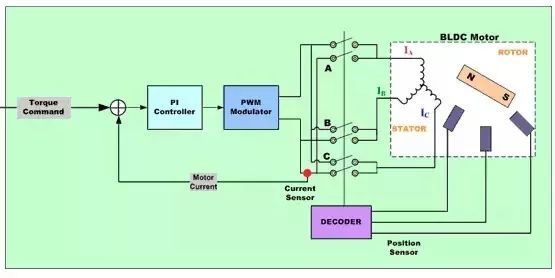
�D1������BLDC늙C�����ο������ĺ�����D
�ڈD1�У�ÿҪͨ�^һ��늙C�K�ˁ������������������늙C�K�˿����c�Դ늌W�ϔ��_��Ƕ���늙C�е����N�������������ṩ��(sh��)����̖��������60�ȵ����΅^(q��)��(n��i)�y���D(zhu��n)��λ�ã�����늙C���������ṩ�@Щ��Ϣ������ÿ�ɂ��@�M�ϵ��������ȣ����������@�M�ϵ�������㣬�@�N�����H�ܮa(ch��n)������������������֮һ��������gʸ�����S��늙C���D(zhu��n)�ӣ�늙C�K�˵������ÿ�D(zhu��n)60�ȕr�����F(xi��n)��_�P(gu��n)�������Q�����������gʸ��������90�����ƵĽӽ�30�ȵ�λ�á�
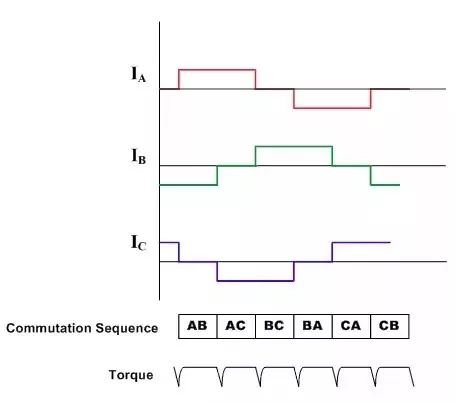
�D2�����ο��ƣ��(q��)�Ӳ��κ�����̎���D(zhu��n)��
���ÿ���@�M��������͞����Σ������_ʼ��������ٵ���Ȼ���ٵ�ؓ������@�ͮa(ch��n)����������gʸ���������S���D(zhu��n)�ӵ����D(zhu��n)��6����ͬ�ķ������M�в����r�������ӽ�ƽ�����D(zhu��n)��������{(di��o)�ͱ����@�ӵ�늙C��(y��ng)���У����û���������������һ����׃���x���ڷ�(li��n)�@�M�иБ�(y��ng)�ķ�늄ӄ݂����������Á�ȡ����ͬ�ĽY(ji��)�����@�N�����(q��)��ϵ�y(t��ng)��������·�ĺ����Զ��dz���ͨ�����������������^���ЅsҪ�����D(zhu��n)�ؼy�����}��
BLDC늙C�����������Q��
���������Q��߀�����Ԟ��ṩƽ�⡢���ʵğoˢֱ��늙C���ơ��@��Ҫ�������һ�������oˢ늙C������һ�����y(t��ng)����늄ӄݣ������a(ch��n)�����D(zhu��n)�������е�ʽ�����x���D(zhu��n)�S�D(zhu��n)��=Kt [IRSin��o��+ISSin��o+120��+ITSin��o+240��]
����
o���D(zhu��n)�S��늽Ƕ�
Kt��늙C���D(zhu��n)�س���(sh��)
IR��IS��IT������
�����λ��������ҵģ�IR=I0Sino��IS=I0Sin��+120o����IT=I0Sin��+240o��
���õ����D(zhu��n)�S�D(zhu��n)��=1.5I0*Kt��һ���������D(zhu��n)�S�Ƕȵij���(sh��)�����������Q��oˢ늙C������Ŭ���(q��)������늙C�@�M������·����S��늙C�D(zhu��n)�Ӷ�ƽ��(w��n)���M������׃�����x���@Щ��������P(gu��n)��λ���@�����������a(ch��n)��ƽ��(w��n)���D(zhu��n)��������gʸ�����������c�D(zhu��n)�������ķ������в�׃�����@���������c�D(zhu��n)�����P(gu��n)���D(zhu��n)�ؼy�����D(zhu��n)���}�_�������S��늙C�����D(zhu��n)������늙C�����ƽ��(w��n)�����Ҳ��{(di��o)�ƣ���Ҫ�����D(zhu��n)��λ����һ���Мy�������������H�ṩ�ˌ����D(zhu��n)��λ�õĴ���Ӌ�㣬߀�������_��Ŀ��Ҫ�����@��ԭ��Ҫ��ľ��a�������������l(f��)���Ƿ�����
�D3��BLDC늙C���Ҳ��������ĺ�����D
�����@�M�����횽Y(ji��)�Ϯa(ch��n)��һ��ƽ��(w��n)�ij����D(zhu��n)��������gʸ�������Ҷ����@�M��ÿ����λ���120�Ƚǣ����ÿ�����M�������������ҵĶ������ƞ�120�ȡ����þ��a���е�λ����Ϣ�팦�ɂ����Ҳ��M�кϳɣ��ɂ��g�����ƞ�120�ȡ�Ȼ���@Щ��̖�����D(zhu��n)��ֵ��������Ҳ�������c����Ҫ���D(zhu��n)�س����ȡ��Y(ji��)�����ɂ����Ҳ��������õ�ǡ��?sh��)Ķ��࣬�Ķ�����������a(ch��n)���D(zhu��n)�Ӷ���������gʸ�����������������̖ݔ��һ���ڃɂ��m��?sh��)�늙C�@�M���{(di��o)�������P-I���������������D(zhu��n)���@�M�е�������ܿ��@�M�����ؓ��(sh��)�ͣ���˲��ܱ��քe���ơ�ÿ��P-I��������ݔ�����͵�һ��PWM�{(di��o)������Ȼ���͵�ݔ����̓ɂ�늙C�K�ˡ���(y��ng)�õ�������늙C�K�˵�늉�Դ�ڑ�(y��ng)�õ�ǰ�ɂ����M����̖��ؓ��(sh��)�ͣ����ڷքe�g��120�ȵ���������늉����Y(ji��)�������Hݔ��������εĸ�ۙ�������������̖������������gʸ��ƽ��(w��n)�D(zhu��n)�ӣ������ϵ��Է�(w��n)����������ķ���λ��һ��ͨ�^���������D(zhu��n)�����_����(w��n)�����Ƶ����������D(zhu��n)��Y(ji��)����Ȼ�����������ڵ�늙C�ٶ���Ч�ʺܸߣ��ڸ�늙C�ٶ��������_���@�������ٶ���ߣ����������������횸�ۙһ�������l�ʵ�������̖��ͬ�r��������횿˷��S���ٶ������������l�������ӵ�늙C�ķ�늄ӄݡ�����P-I��������������������l��푑�(y��ng)������������ƻ�·�ĕr�g׃���ɔ_��������λ�����늙C����е������`��ٶ�Խ�ߣ��`��Խ���@���ɔ_������gʸ���������D(zhu��n)�ӵķ��Ķ������c��������a(ch��n)��λ�ơ����a(ch��n)���@�N��r�r��ͨ�^һ������������Ԯa(ch��n)���^С���D(zhu��n)�أ������Ҫ���������������D(zhu��n)�أ�Ч�ʽ��͡��S���ٶȵ����ӣ��@�N���͌������m(x��)����ij�N�̶��ϣ��������λλ�Ƴ��^90�ȡ����a(ch��n)���@�N��r�r���D(zhu��n)�p�����㡣ͨ�^���ҵĽY(ji��)�ϣ������@�c���ٶȌ�(d��o)����ؓ�D(zhu��n)�أ����Ҳ�͟o�����F(xi��n)��
AC늙C�����㷨
1���������� �������ƣ���V/Hz���ƣ���һ������ָ��늙C�ٶȵĺ��η�����ָ��늙C�ķ�(w��n)�B(t��i)ģ����Ҫ���ګ@�ü��g(sh��)�����˲�B(t��i)�����Dz����܌��F(xi��n)�ġ�ϵ�y(t��ng)�����������·�����˿���늙C�������Դֻ����������l����׃����
2��ʸ�����ƻ�ň�������� ��늄әC�е��D(zhu��n)���S�����Ӻ��D(zhu��n)�Ӵň��Ĺ��ܶ�׃�������Ү��ɂ��ň����������r�_����ֵ���ڻ��ژ����Ŀ����У��ɂ��ň��g�ĽǶ��@��׃����ʸ�������O(sh��)����AC늙C���ٴ΄�(chu��ng)�������P(gu��n)ϵ�����˿����D(zhu��n)�أ����ԏĮa(ch��n)���Ĵ�ͨ��������������Ԍ��F(xi��n)DC�C����푑�(y��ng)�ԡ�һ��ACָ��늙C��ʸ�������cһ���Ϊ��Ą��DC늙C�������ơ���һ��DC늙C�У��Ʉ�����IF���a(ch��n)���Ĵň�������F�c��늘����IA���a(ch��n)����늘д�ͨ��A(ch��)�������@Щ�ň�����(j��ng)�^ȥ�����g�ܷ�(w��n)������ˣ���늘�����ܿ��Կ����D(zhu��n)�ؕr���ň������Ա��ֲ���Ӱ푣������F(xi��n)�˸����˲�B(t��i)푑�(y��ng)������AC늙C�Ĵň�������ƣ�FOC������ģ��DC늙C�IJ����������ܿ�׃����ͨ�^��(sh��)�W׃�Q�����D(zhu��n)�Q��DC����AC����Ŀ���Ǫ����Ŀ����D(zhu��n)�غʹ�ͨ��
�ň�������ƣ�FOC���ЃɷN������
ֱ��FOC���D(zhu��n)�Ӵň��ķ���Rotor flux angle����ͨ�^��ͨ�^�y��ֱ��Ӌ��õ��ġ�
�g��FOC���D(zhu��n)�Ӵň��ķ���Rotor flux angle����ͨ�^���D(zhu��n)���ٶȺͻ��slip���Ĺ����y�����g�ӫ@�õġ�
ʸ������Ҫ���˽��D(zhu��n)�Ӵ�ͨ��λ�ã��������\�ýK�������늉�������AC�Б�(y��ng)늙C�ĄӑB(t��i)ģ�ͣ���֪�R��ͨ�^�㷨��Ӌ�㡣Ȼ���Č��F(xi��n)�ĽǶȿ�������Ӌ���YԴ�����������P(gu��n)��Ҫ�ġ�
���Բ��ò�ͬ�ķ�ʽ�팍�F(xi��n)ʸ�������㷨��ǰ�����g(sh��)��ģ��������m��(y��ng)���Ƽ��g(sh��)������������푑�(y��ng)�ͷ�(w��n)���ԡ�
3��AC늙C��ʸ�����ƣ������˽� ʸ�������㷨���ǃɂ���Ҫ���D(zhu��n)�Q��Clark׃�Q��Park׃�Q�����������\�㡣����Clark��Park׃�Q���������Կ��Ƶ��D(zhu��n)�Ӆ^(q��)����D(zhu��n)��������@�������Sһ���D(zhu��n)�ӿ���ϵ�y(t��ng)�Q����(y��ng)����(y��ng)���D(zhu��n)�ӵ�늉�����ʹ�ӑB(t��i)׃��ؓ�d�µ��D(zhu��n)�ػ���Clark׃�Q��Clark��(sh��)�W�D(zhu��n)�Q��һ������ϵ�y(t��ng)�ijɃɂ�����ϵ�y(t��ng)��
����Ia��Ib������������ĽM�ɲ��֣�Io�Dz���Ҫ��homoplanar����
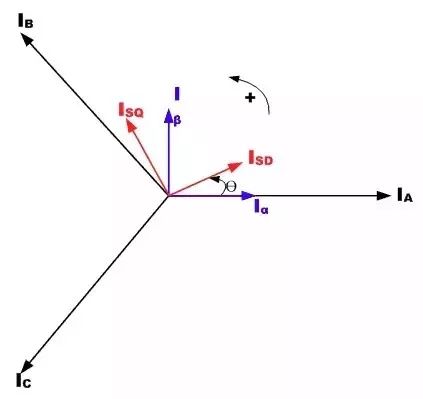
�D4�������D(zhu��n)������c�D(zhu��n)�Ӆ���ϵ���P(gu��n)ϵ
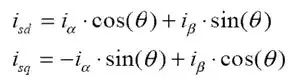
4��Park�D(zhu��n)�Q��Park��(sh��)�W�D(zhu��n)�Q���p���o�B(t��i)ϵ�y(t��ng)�D(zhu��n)�Q���D(zhu��n)��ϵ�y(t��ng)ʸ��
�����������ʾͨ�^Clarke�D(zhu��n)�Q�M��Ӌ�㣬Ȼ��ݔ�뵽ʸ���D(zhu��n)��ģ�K�������@���D(zhu��n)�ӽǦȣ��Է��ϸ������D(zhu��n)��������d��q��������(j��)������ʽ�����F(xi��n)�˽ǶȦȵ��D(zhu��n)�Q��
AC늙C�Ĵň�����ʸ�����ƵĻ����Y(ji��)��(g��u)
Clarke׃�Q�����������IA��IB�Լ�IC������IA��IB�ڹ̶����˶������е������׃�Q��Isd��Isq���ɞ�Park׃�Qd��q�е�Ԫ�ء���ͨ�^늙Cͨ��ģ�́�Ӌ������Isd��Isq�Լ�˲�r�����Ǧȱ��Á�Ӌ�㽻���Б�(y��ng)늙C��늄�Ť�ء�
�@Щ��(d��o)��ֵ�c����ֵ����^������PI���������¡�
����ʸ����늙C���Ƶ�һ�����Ѓ�(y��u)���ǣ����Բ���ͬһԭ�����x���m�ϵĔ�(sh��)�Wģ��ȥ�քe���Ƹ��N��͵�AC��PM-AC����BLDC늙C��
BLDC늙C��ʸ������
BLDC늙C�Ǵň�����ʸ�����Ƶ���Ҫ�x������FOC�ğoˢ늙C���ԫ@�ø��ߵ�Ч�ʣ�Ч�ʿ����_��95%�����Ҍ�늙C�ڸ��ٕrҲʮ����Ч�ʡ�
1�����M늙C����
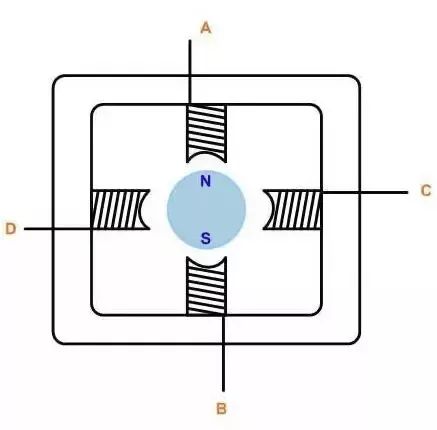
�D5
���M늙C����ͨ�������p���(q��)���������늙C���M�ɰ�����ГQ�@�M�팍�F(xi��n)��ͨ���@�N���M늙C��3���(q��)����ن���ȫ���M�(q��)�ӣ����@�Nģʽ�У����@�M����������늣�AB/CD/BA/DC��BA��ʾ�@�MAB�ļ���Ƿ������M�еģ����@һ��Q�����ȫ���Mģʽ�����߲��(q��)��ģʽ�����κ�һ���r�g��ֻ��һ���늡����p��ȫ���M�(q��)�ӣ����@�Nģʽ�У��p��һ���늣���ˣ��D(zhu��n)�ӿ����ڃɂ��O֮�g����ģʽ���Q���p��ȫ���M���@һģʽ�ǃɘO늙C�ij��B(t��i)�(q��)�����ݔ����Ť�ء��۰벽�Mģʽ���@�Nģʽ�����ಽ�M���p�ಽ�M�Y(ji��)����һ���늣������늣�Ȼ���p���늣�Ȼ������늡�����ˣ�늙C�벽�M�����\�D(zhu��n)���@һģʽ���Q��벽�Mģʽ����늙Cÿ����ŵ���Ч����ǜp����һ�룬��ݔ����Ť��Ҳ�^�͡�����3�Nģʽ�������ڷ������D(zhu��n)�ӣ���rᘷ����������෴�t���С�ͨ�������M늙C���ж��O���Ա�pС����ǣ����ǣ��@�M�Ĕ�(sh��)�����(q��)������Dz�׃�ġ�
2��ͨ��DC늙C�����㷨
ͨ��늙C���ٶȿ��ƣ��e�Dz���2�N�·��늙C��
��ǿ���
PWM�ز�����
����ǿ�����ǿ�����ͨ��늙C�ٶȿ��Ƶĺ��εķ�����ͨ�^TRIAC���c���ǵ�׃�Ӂ������ٶȡ���ǿ����Ƿdz���(j��ng)���Ľ�Q���������ǣ�Ч�ʲ�̫�ߣ�����늴Ÿɔ_��EMI����
�D6��ͨ��늙C����ǿ���
�D6��������ǿ��ƵęC������TRIAC�ٶȿ��Ƶĵ��͑�(y��ng)�á�TRIAC�T�}�_�������ƄӮa(ch��n)������Ч�ʵ�늉����Ķ��a(ch��n)���˲�ͬ��늙C�ٶȣ����Ҳ������^�㽻��z�y�·�������˕r���������t�T�}�_����PWM�ز�����PWM������ͨ��늙C�ٶȿ��Ƶģ������M�Ľ�Q���������@һ��Q�����У�����MOSFET������IGBT��ͨ���l����AC��늉����M����늙C�a(ch��n)���S�r�g׃����늉���
�D7��ͨ��늙C��PWM�ز�����
���_�P(gu��n)�l�ʷ���һ���10-20KHz������������ |
��Ϣ")