�S�����I�͂�����ӮaƷ���ø����M�ļ��g���������o늳؎���Խ��Խ�y���A�y��ؓ�d�������Ҫ���ɿ��������ܵ�늳����Ӌ���oՓ�������d���˹����� (AI) �������O���У�߀���ڟo�˙C��늄ӹ��ߺ͙C���˵ȳ���ϵ�y�У�늳ض������v�߶ȄӑB��ؓ�d�������@Щ�����A�y��ؓ�d�o��ه���_�y������ȫ�P�]ϵ�y���ֹ�����늵��OӋ�ˆT�����������mȻ�o�K��@�������P�C����ֻ���Ñ��е���ˬ�����o�˙C�Ŀ��Љ���s��������صİ�ȫ�L�U��
늳����Ӌ��������ʲô��
늳����Ӌʹ�������늉��y����Ӌ����������������늠�B��������B��ʣ�����������y�Ļ��� Impedance Track���g��늳����Ӌ���O늳�ؓ�d׃���������@ʹ���܉���늳ط�늕r�M�о��_�����y�����Ķ�Ӌ����߾��ȵČ��r��늠�B�A�y����D 1 ��ʾ����늳ؽ�ģ����l���-��� (RC) ģ�����ԑ����@Щ����׃����늳�ؓ�d��Ȼ��������ؓ�d�����׃����l�����͑��ã���Ҫ��ȫ���ģ�ͺ����m���㷨�����֜ʴ_�ij�늠�B���㡣
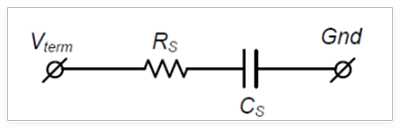
���l RC 늳�
�ӑB Z-Track �㷨��һ�N���� BQ41Z90 �� BQ41Z50 �������OӋ��늳�Ӌ��������������y�迹��ۙ�㷨���� BQ40Z50 �� BQ34Z100 ���������\�У����^���ߣ��ӑB Z-Track �㷨���ڄӑBؓ�d����l�����ṩ�ʴ_��늳س�늠�B��������B��ʣ���������㡣
������������lؓ�dӰ�늳ؕr���迹��ۙ�y���x��늳صĂ��y RC ��ģ���o������늳���衣�ӑB Z-Track �㷨���F��һ������˲�Bģ�ͣ�ԓģ�Ϳ���ģ�M늉�˲�B���m���ӑB�����������ʹ������������@�N����Ҳ�܌��r������衣
��ʲô��������Ҫ��
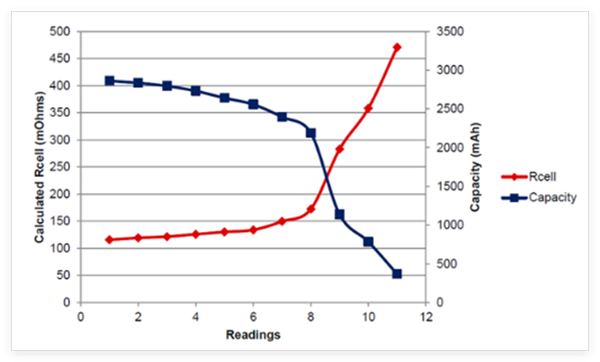
��ۙ��茦����늳ص�����ʹ�É������g�ṩ��߾��ȵĺ�늠�BӋ�����P��Ҫ����D 2 ��ʾ��늳؆�Ԫ�������S��늳ص�ѭ�h���ϻ����������ӣ�ֱ���_��ij���D���c���ڴ��D���c̎��������ָ�������L��ֱ��늳؉����Y�������Ҳ���S�ضȶ��l���@�����ӡ�늳؆�Ԫ������c�ضȳʷ����Pϵ���ض�Խ�ͣ����Խ�ߣ���ˣ�늳؆�Ԫ���_�� 0% ��늠�B֮ǰ�����ṩ��������������Խ�͡�

��x��늳؆�Ԫ������S�r�g��׃��
��늳����Ӌ�o���������r��Ӌ����ĺ�늠�B�`����S��늳��ϻ����ɱ������L���ڲ����A�y�Ҳ�������ؓ�d�£�������M�������£���늠�B��ʣ������������`����߿��_ 60%����Ϳ��_ 10%����K�Ñ��������@�N��r������늠�B��ͻȻ�½����O����ܕ���������Ӌ�^�߶������P�C����D 3 ��ʾ��
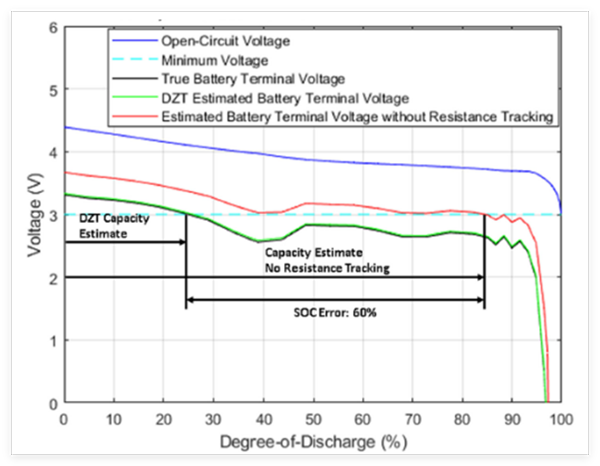
ʣ������������^��Impedance Track ���g���ӑB Z-Track ���g�c�o�����£�1.75C ؓ�d��
һ������
���Oһ�����T��늄�����܇�ؼҡ����鿴�˳�늠�B���l�Fʣ�� 30%�����ǛQ���ؼ�ǰ�@��ȥ���s؛�ꡣ���������_�̵�r������@ʾʣ�� 15%�����ڻؼҵ�·�ϣ�늄�����܇ͻȻֹͣ��늣��������� 12% ���� 0%���F�ڣ��T܇��Ҫô�T܇�ؼң�Ҫô��܇��
�ӑB Z-Track �㷨���Ա����@�N��r���c���y��늳����Ӌ��ͬ��TI �ĄӑB Z-Track ���g��ʹ�ڲ����A�y��ؓ�d��Ҳ���ṩ���_ 99% �������B���ȣ�ʹ�������܉�늳سߴ粢��늳��\�Еr�g���L���_ 30%���@��K����K�Ñ��ڟo�˙C��늄�����܇���Pӛ����X�ͱ�yʽ�t���x���ȸ�Ҫ�������ṩ���ɿ������ܡ�
���Y
�mȻ�����A�y��ؓ�d늳�ؓ�d�mȻ���ش���OӋ���𣬵���������һ������ϵ�y�Ŀɿ��Ի���K�Ñ��w�ӑB Z-Track �㷨�ȹ��������ڌ��F늳ع���O���p���\�е��OӋ����δ��o�˙C�����������w�У��������⽵�䣬늄�����܇Ҳ�ܰ�ȫ���Ñ��ؼҡ� |